(via make)
A convergence of my favourite solution looking for a problem, and the medium where sooner or later, everything worth reproducing, gets reproduced. Legoification is like a coming of age ritual.
Anyway here it is. I quite like this because it uses some sort of distance sensor rather than a giro… and if you can get a lego motor-sensor loop fast enough to keep an unbalanceable thing balanced, then you can probably use something similar on a reprap to get around having to to have ultra-high-tolerance engineering on every part. The machine can just sort of “feel its way”.
Or something. On that note, here’s another solution looking for a problem (another favourite of mine) a hexapod… doing what hexapods always do, which is pushups, then a spot of very slow walking… but this one’s different because it’s used genetic algorithms to teach itself to walk… and the good thing about that, is that you can use the same software on different hardware configurations.
And finally… I saw recently that the 2nd Life guy’s new thing is to create a… “a sentient artificial intelligence which only exists in a virtual world, capable of thinking and dreaming.”
LOL – no chance.
Ok – I’ll refine that… there’s no chance of telling the difference between the real thing and a simulacra…
… but a difference that makes no difference is not a difference* right?
—
* that’s a classical allusion – 10 points to any sci-fi fan who can tell me where it’s from.
 Cross-Border-Collaboration
Cross-Border-Collaboration Lego-Based Copy-Monopoly Liberation
Lego-Based Copy-Monopoly Liberation  Ball Organising Conveyer Belt
Ball Organising Conveyer Belt Slomo Hat
Slomo Hat 3D Printed Lego Blending
3D Printed Lego Blending Legoification of Open Hardware
Legoification of Open Hardware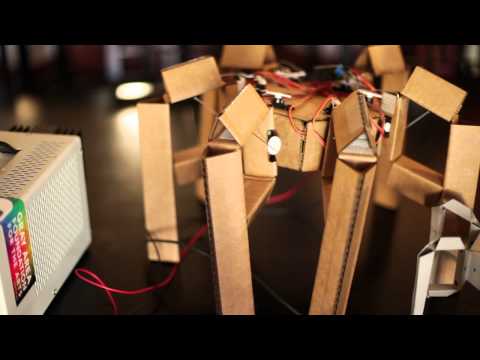 Cardboard Hexapod
Cardboard Hexapod Brain The Size Of A Planet
Brain The Size Of A Planet Lego Biotech Bot
Lego Biotech Bot On Addiction
On Addiction And The Void Mooned Back...
And The Void Mooned Back... The Spirit Of The World
The Spirit Of The World A Machine to Steal Souls
A Machine to Steal Souls More Anti Digital
More Anti Digital Thync
Thync Robotic Sensory Loops and Whatnot
Robotic Sensory Loops and Whatnot Cartestian Robot Roundup.
Cartestian Robot Roundup. Post-Scarcity Link-Dump
Post-Scarcity Link-Dump Servo Bender
Servo Bender
[…] could probably convert into a hexacopter quite easily. See… that’s the advantage of the self-teaching software that I was on about a couple of days back. If your dog gets hold of your octocopter and converts it […]